淮南电动搬运机械手
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。 三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、 Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。南京搬运机械手,南京。淮南电动搬运机械手
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等; 7. 误操作保护装置。绍兴电动搬运机械手搬运机械手,哪家生产,南京高锐特起重机有限公司。
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3. 定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点: 1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。搬运机械手,哪家生产,南京高锐特有限公司。
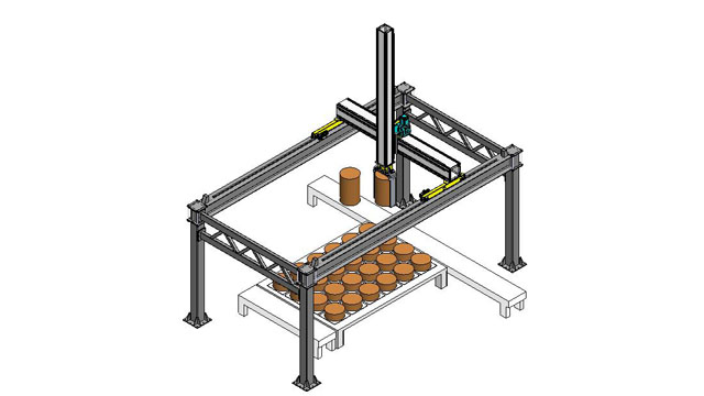
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4. 重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。三坐标搬运机械手,PLC控制。应用自动搬运场合。淮南电动搬运机械手
三坐标搬运机械手,自动化程度高,南京高锐特起重机有限公司生产。淮南电动搬运机械手
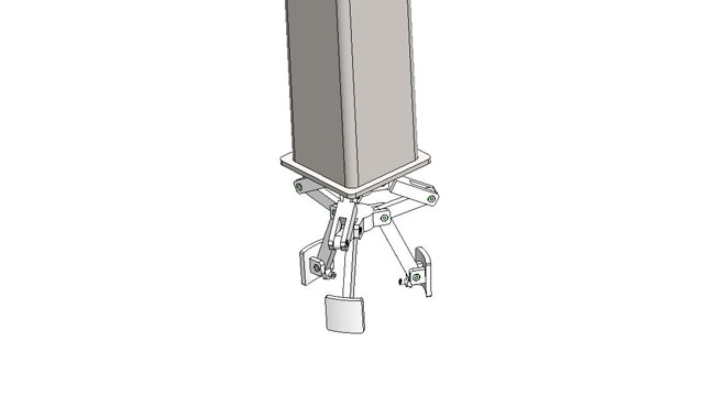
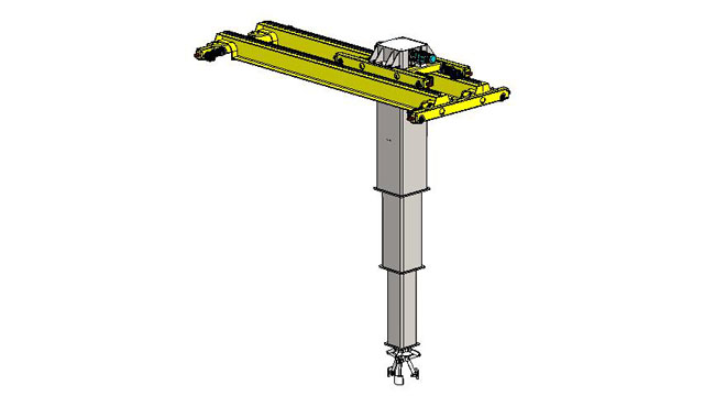
一、搬运机械手产品构成: 三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。淮南电动搬运机械手
南京高锐特起重机械有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在江苏省等地区的机械及行业设备中始终保持良好的商业口碑,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力,南京高锐特起重机械供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!
上一篇: 没有了
下一篇: 淮南壁行起重机哪家好